
近日,禁忌书屋-全网禁忌内容大全持续更新 李浩教授团队在机械工程领域国际权威期刊《Robotics and Computer-Integrated Manufacturing》(中科院一区TOP,IF =11.4)上发表题目为《Digital twin and AI-driven robotic embodied control system a novel adaptive learning and decision optimization method》(数字孪生和AI驱动的机器人具身智能控制系统:一种新型的自适应学习与决策优化方法)的研究论文。禁忌书屋-全网禁忌内容大全持续更新 李浩教授为第一作者。
传统的机器人作业控制是通过固定程序化控制来应对动态生产环境和复杂任务需求时,往往会遇到诸如开发周期过长、灵活性不足等局限。AI技术的突破为解决这一困境提供了新思路。机器视觉赋予机器人感知环境的“眼睛”,深度强化学习提供了决策优化的“头脑”,而数字孪生技术则构建了虚拟与现实之间的桥梁,使得机器人能够在高保真的虚拟环境中实现训练与优化。为此,李浩教授团队提出了一种集成数字孪生和AI模型的机器人具身智能控制新型架构。该架构有机融合了数字孪生(DT)、机器视觉、深度强化学习(DRL)和物理作业系统。
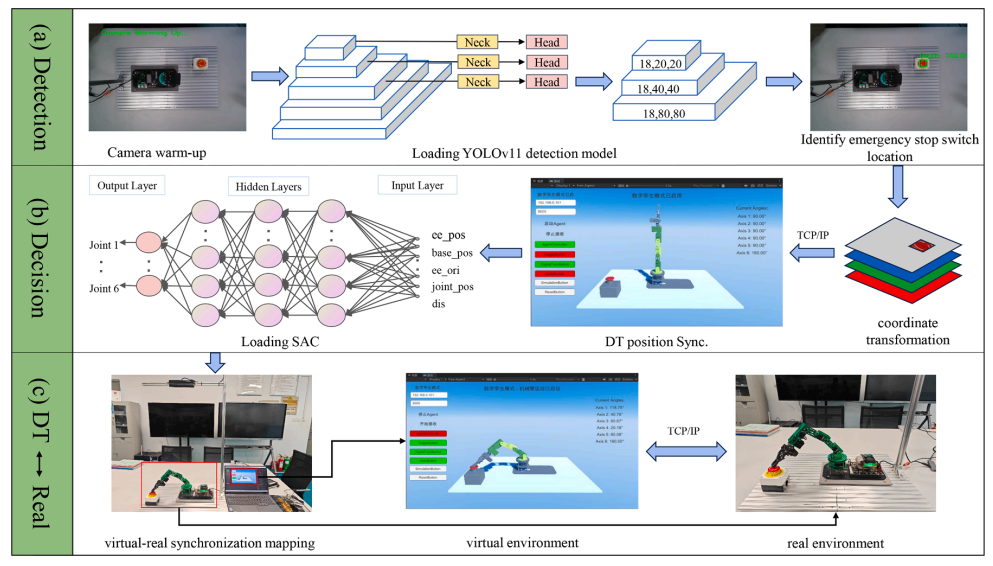
提出的新型自适应学习与决策优化方法是一个“感知—决策—执行”的闭环框架。首先,机器视觉能够实时感知环境,并将目标对象的三维姿态精准映射到数字孪生空间。其次,在数字孪生环境中进行深度强化学习的机器人作业任务训练与策略优化。最后,通过物理机器人与数字孪生之间的持续状态同步,实现跨环境的策略迁移与在线优化。以机械臂按压急停按钮作为典型任务场景,实验结果表明,该系统在数字孪生环境中达到了88%的任务成功率,在真实物理环境中达到了73%,并通过微调进一步提升至76%。本文提出的数字孪生与AI驱动的机器人具身控制系统,成功实现了装备作业过程中的感知、决策与执行的有机融合,突破了传统编程作业局限,为复杂工业环境下的柔性智能控制提供了新思路。本文提出的新型方法将迁移至更多类型的工业场景装备作业任务中实践应用,可能会带来装备智能作业管控的重大产业变革。
上述成果得到了国家自然科学基金(52175256, 52275277)、河南省科技研发计划联合基金重点项目(225200810029)的支持。
文章链接://www.sciencedirect.com/science/article/abs/pii/S0736584525001929